Neuromorphic.pdf (3.5 MB)
Abstract-
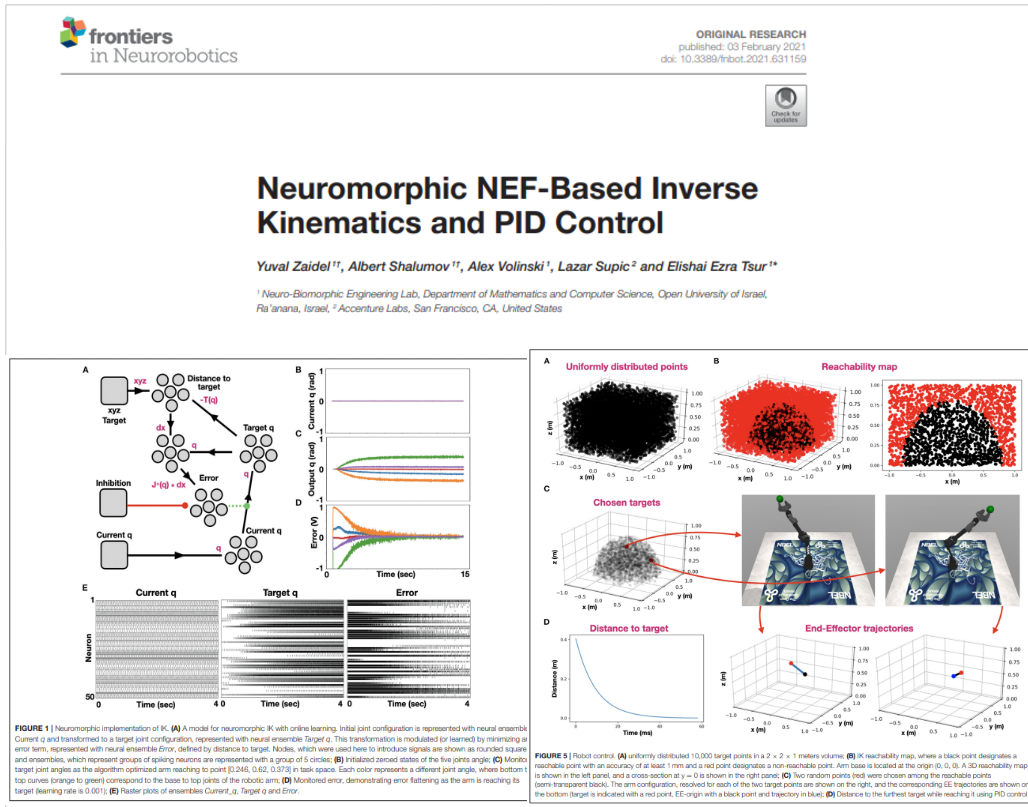
Neuromorphic implementation of robotic control has been shown to outperform
conventional control paradigms in terms of robustness to perturbations and adaptation
to varying conditions. Two main ingredients of robotics are inverse kinematic and
Proportional–Integral–Derivative (PID) control. Inverse kinematics is used to compute
an appropriate state in a robot’s configuration space, given a target position in task
space. PID control applies responsive correction signals to a robot’s actuators, allowing
it to reach its target accurately. The Neural Engineering Framework (NEF) offers a
theoretical framework for a neuromorphic encoding of mathematical constructs with
spiking neurons for the implementation of functional large-scale neural networks. In this
work, we developed NEF-based neuromorphic algorithms for inverse kinematics and PID
control, which we used to manipulate 6 degrees of freedom robotic arm. We used online
learning for inverse kinematics and signal integration and differentiation for PID, offering
high performing and energy-efficient neuromorphic control. Algorithms were evaluated in
simulation as well as on Intel’s Loihi neuromorphic hardware.
Keywords: neural engineering framework, robotic control software, Loihi, neuromorphic engineering, spiking, neural networks, robotic arm
This academic publication features our DYNAMIXEL XM540-W270 & XM430-W350 all-in-one smart actuators
All credit goes to: Yuval Zaidel, Albert Shalumov, Alex Volinski, Lazar Supic and Elishai Ezra Tsur from the Neuro-Biomorphic Engineering Lab, Department of Mathematics and Computer Science, Open University of Israel,Ra’anana, Israel, Accenture Labs, and San Francisco, CA, United States