Clawar2020_Paper_38.pdf (836.4 KB)
Abstract:
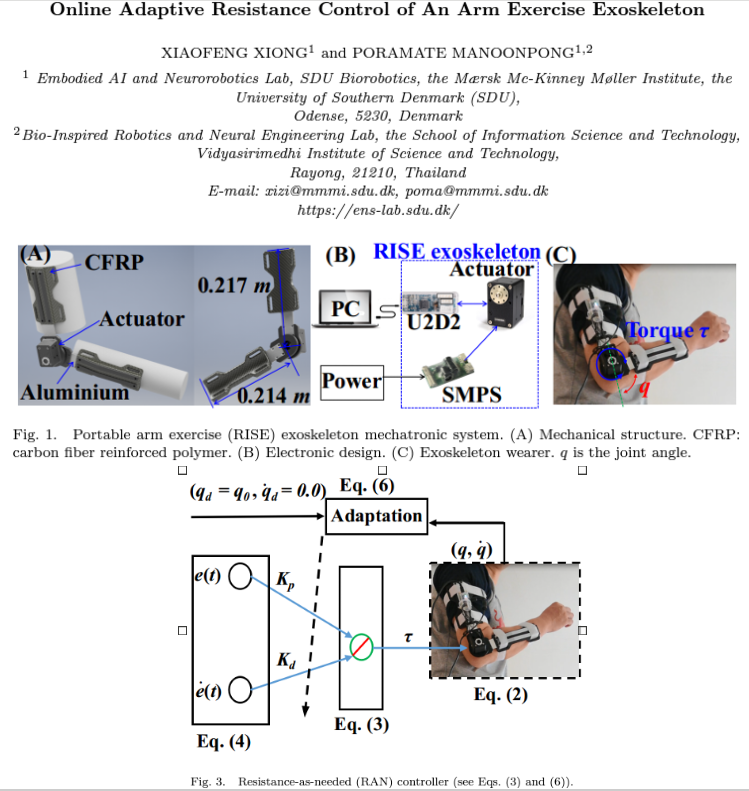
Resistance training is an effective means of strengthening musculoskeletal capabilities; thereby preventing musculoskeletal disorders (MSDs). However, most existing exoskeletons fail to provide active and affordable resistance training. To address this problem, we develop a resistance-asneeded (RAN) controller and an arm exercise (RISE) exoskeleton for resistance training. The exoskeleton is designed and manufactured in a portable, lightweight (0.425 kg), and 3D print manner. Such control adaptability and design portability are facilitated by the RAN controller whose implementation relies only on internal (e.g., joint position) sensing, rather than external (i.e., EMG, electromyography) sensing and physical compliant mechanisms (e.g., springs). The active resistance torque to the RISE exoskeleton is generated by the RAN controller, in which impedance gains Kp and Kd are online tuned. As a result, the RAN controller enables the RISE exoskeleton to produce more adaptive and effective resistance motions that lead to higher training efficiency, compared to conventional constant impedance controllers. The proposed RAN controller and designed RISE exoskeleton pave a way for providing portable and affordable resistance training.
This academic paper features our DYNAMIXEL XM430 series all-in-one smart actuators
All credit goes to: XIAOFENG XIONG and PORAMATE MANOONPONG from the Embodied AI and Neurorobotics Lab, SDU Biorobotics, the Mærsk Mc-Kinney Møller Institute, the University of Southern Denmark (SDU), Odense, 5230, Denmark 2Bio-Inspired Robotics and Neural Engineering Lab, the School of Information Science and Technology, Vidyasirimedhi Institute of Science and Technology, Rayong, 21210, Thailand