Robotic System with Tactile-Enabled High-Resolution Hyperspectral Imaging Device for Autonomous Corn Leaf Phenotyping in Controlled Environments
Abstract
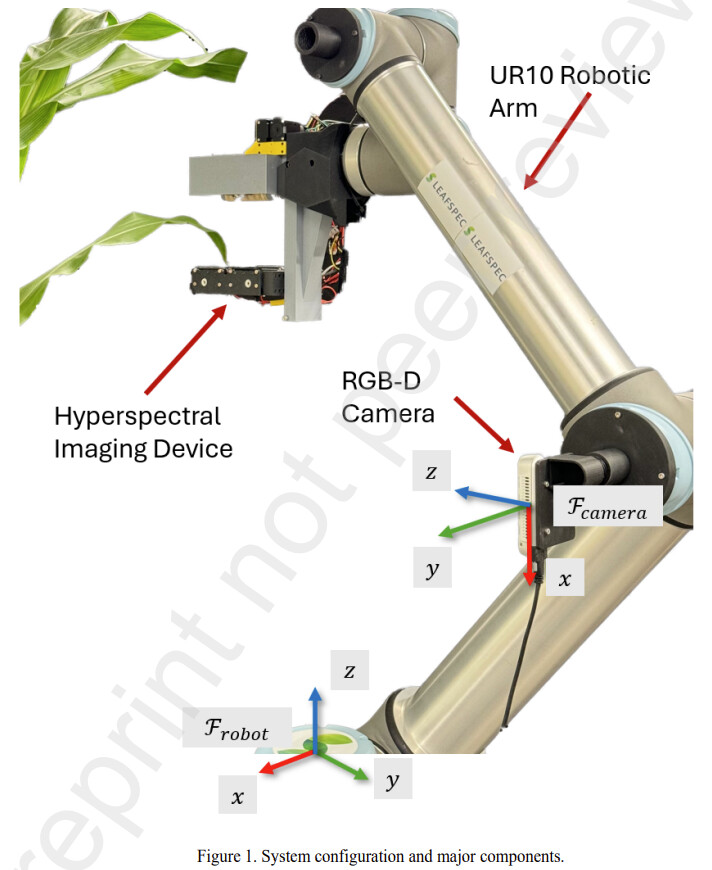
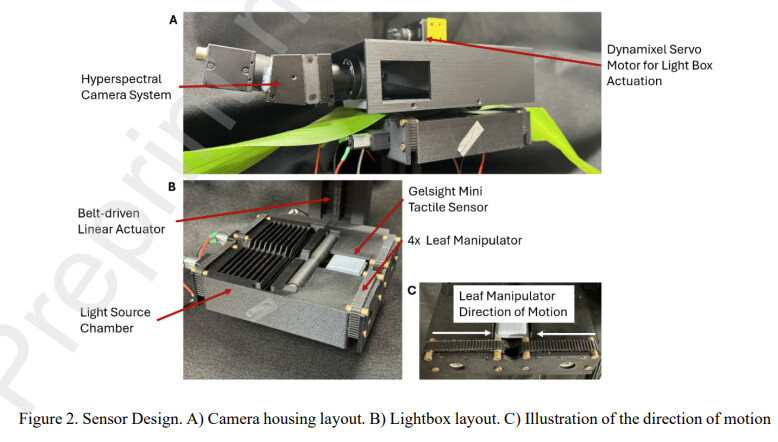
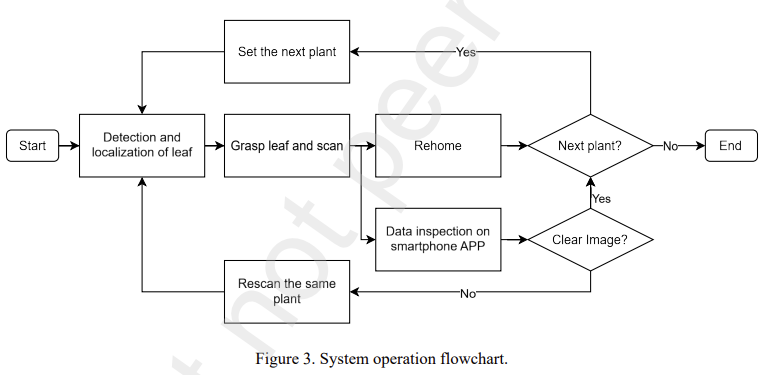
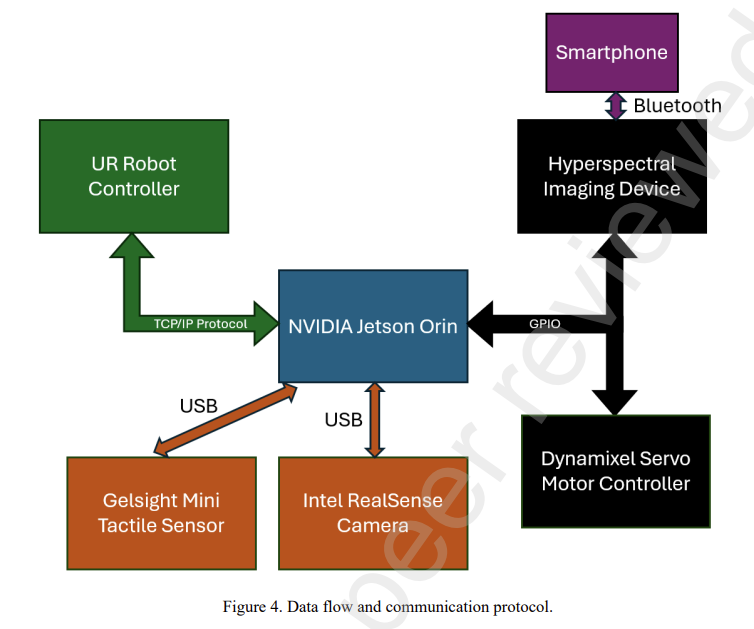
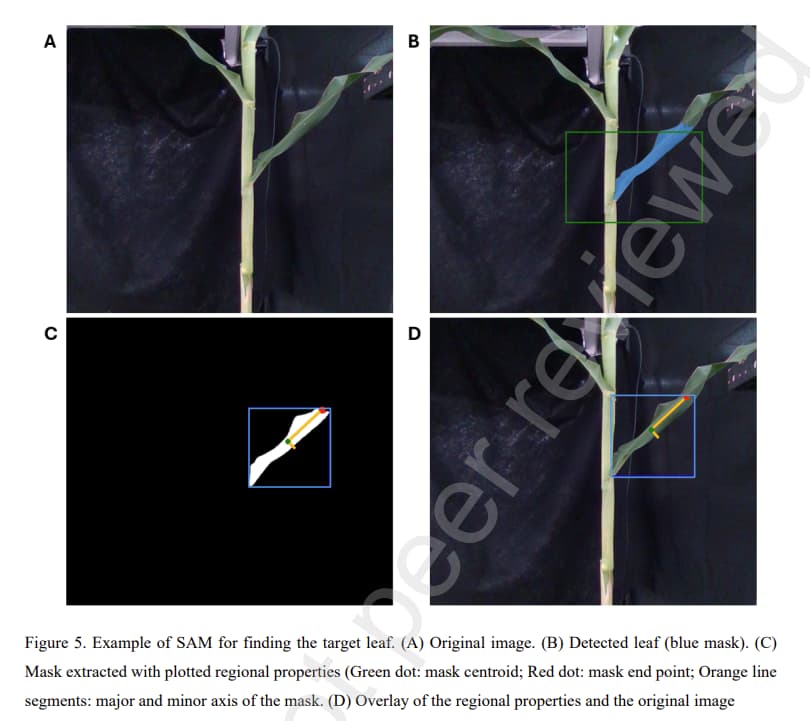
Hyperspectral imaging of individual corn leaves provides valuable data for analyzingnutrient content and diagnosing diseases. However, existing leaf-level imagingtechniques face challenges such as low spatial resolution and labor-intensiveprocesses. To address these limitations, this study developed a robotic systemintegrated with a high-resolution line-scanning hyperspectral imaging device toautonomously scan a corn leaf. The hyperspectral imaging device used a vision-basedtactile sensor for active leaf tracking throughout the scanning process, ensuring highimage quality. Additionally, the device incorporated an in-hand leaf manipulationmechanism that ensured the leaf was properly positioned on the tactile sensing area atthe start of every scanning. The scanning process was executed by a robotic armequipped with an RGB-D camera and integrated with the Segment Anything Model(SAM), enabling autonomous leaf detection, localization, grasping, and scanning. Thesystem was tested on V10-stage corn plants and the success rate was 91.4% with anaverage 4.8 seconds for leaf detection and localization and an average leaf scanningtime of 38.3 seconds.
Keywords: Autonomous Corn Phenotyping, Vision-based Tactile Sensing, hyperspectral imaging, Segment Anything Model, agricultural robots
Powered by DYNAMIXEL
Full Research Paper: https://papers.ssrn.com/sol3/papers.cfm?abstract_id=5108980
All Credits Go To: Xuan Li, Ziling Chen, Raghava Sai Uppuluri, Pokuang Zhou, Tianzhang Zhao, Darrell Zachary Good, Yu She, Jian Jin, and Purdue University
ROBOTIS e-Shop: www.robotis.us
DYNAMIXEL Page: www.dynamixel.com
DYNAMIXEL LinkedIn: DYNAMIXEL | LinkedIn