ScanningCamera.pdf (2.0 MB)
Abstract
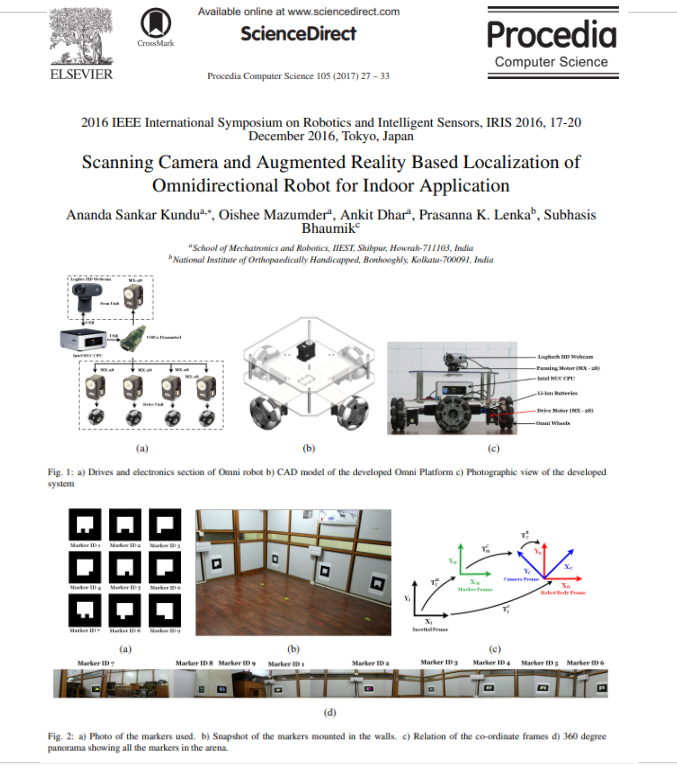
The aim of this paper is to develop an absolute visual localization system of an Omni wheeled robot for indoor navigation. Omni wheeled based robots have omni directional drive capacity. Conventional localization technique like odometry is not suitable for such drives due to wheel slippage. An omni robot platform with 4 omni-directional wheels powered by dynamixel motor and a scanning platform has been developed. We have implemented a localization technique using camera as visual sensor and multiple markers based on ‘ArToolKiT’ an augmented reality application. Various camera related distortion were reduced using 2nd order surface fit of camera calibration data. To increase the accuracy of the system, fusion of results from multiple markers has been implemented. Performance of the proposed localization has been verified by studying different pattern based movement of the
system in a test area of 5m X 5m. Novelty of this paper is in development of an omni wheeled robotic wheelchair and proposing a robust absolute visual based localization set up with single camera and multiple fused markers for indoor navigation.
c 2016 The Authors. Published by Elsevier B.V.
Peer-review under responsibility of organizing committee of the 2016 IEEE International Symposium on Robotics and Intelligent
Sensors (IRIS 2016).
Keywords: Augmented reality; Fusion; Visual localization ; Omni robot; Scanning Camera
This academic paper features our DYNAMIXEL MX-28 all-in-one smart actuators
All credit goes to: Ananda Sankar Kundua, Oishee Mazumdera, Ankit Dhara, Prasanna K. Lenkab, Subhasis Bhaumik, School of Mechatronics and Robotics, IIEST, Shibpur, Howrah-711103, India bNational Institute of Orthopaedically Handicapped, Bonhooghly, Kolkata-700091, India cAerospace Engineering and Applied Mechanics, IIEST, Shibpur, Howrah-711103, India