Synergy-based robotic quadruped leveraging passivity for natural intelligence and behavioural diversity
Abstract
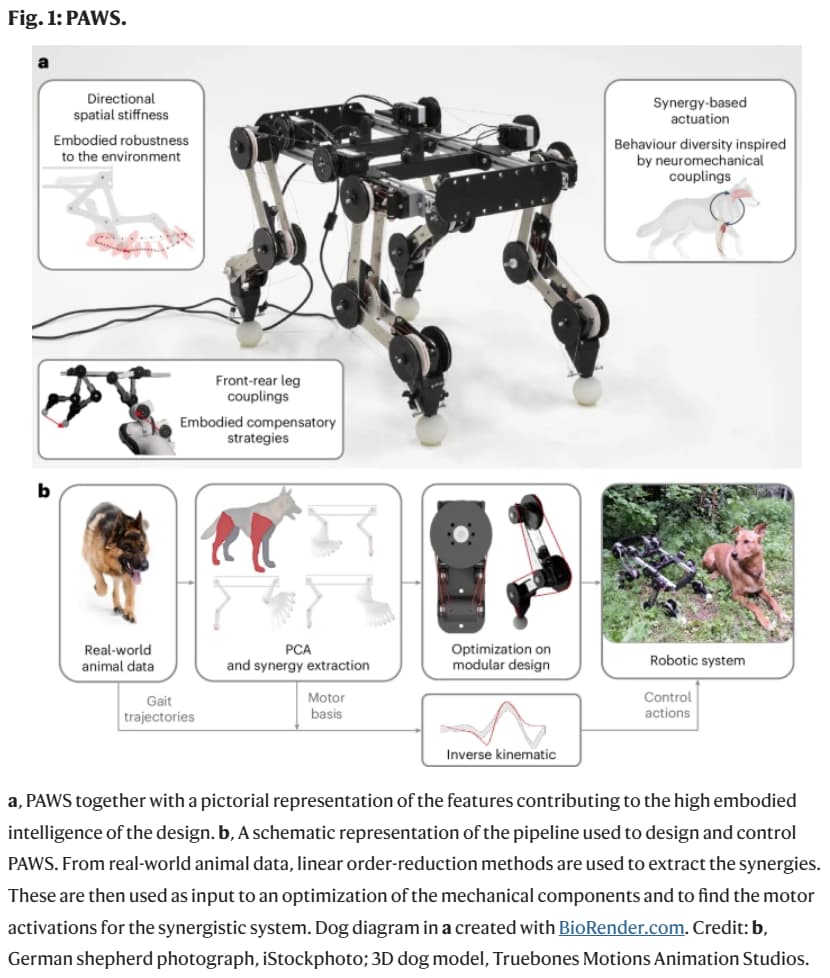
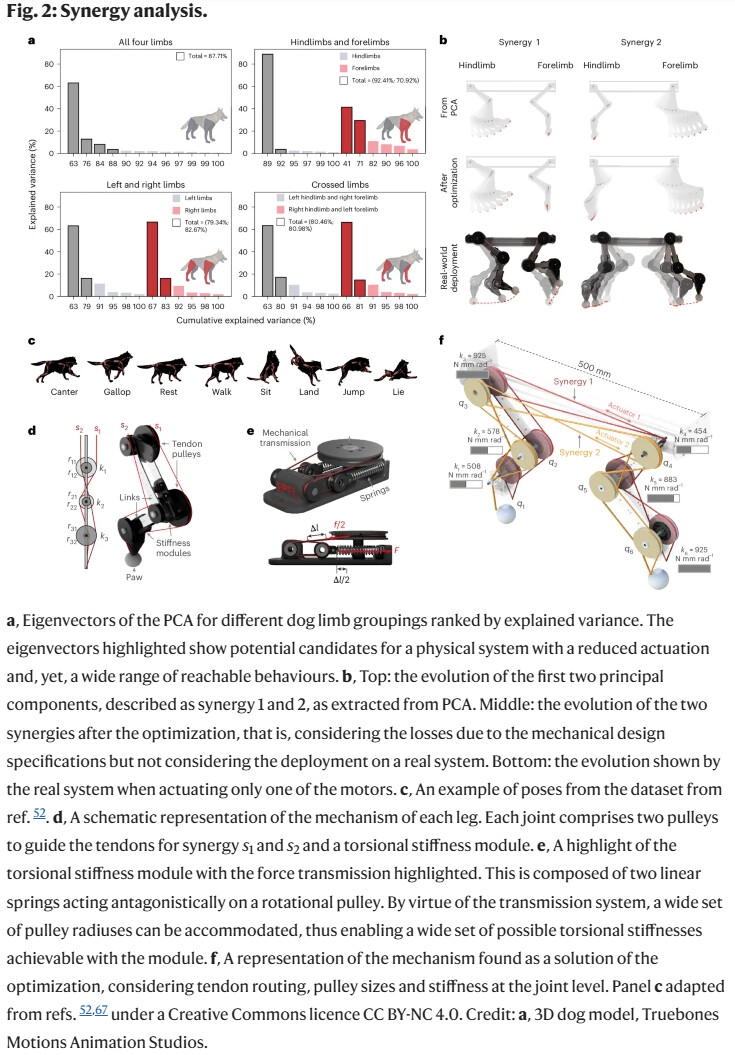
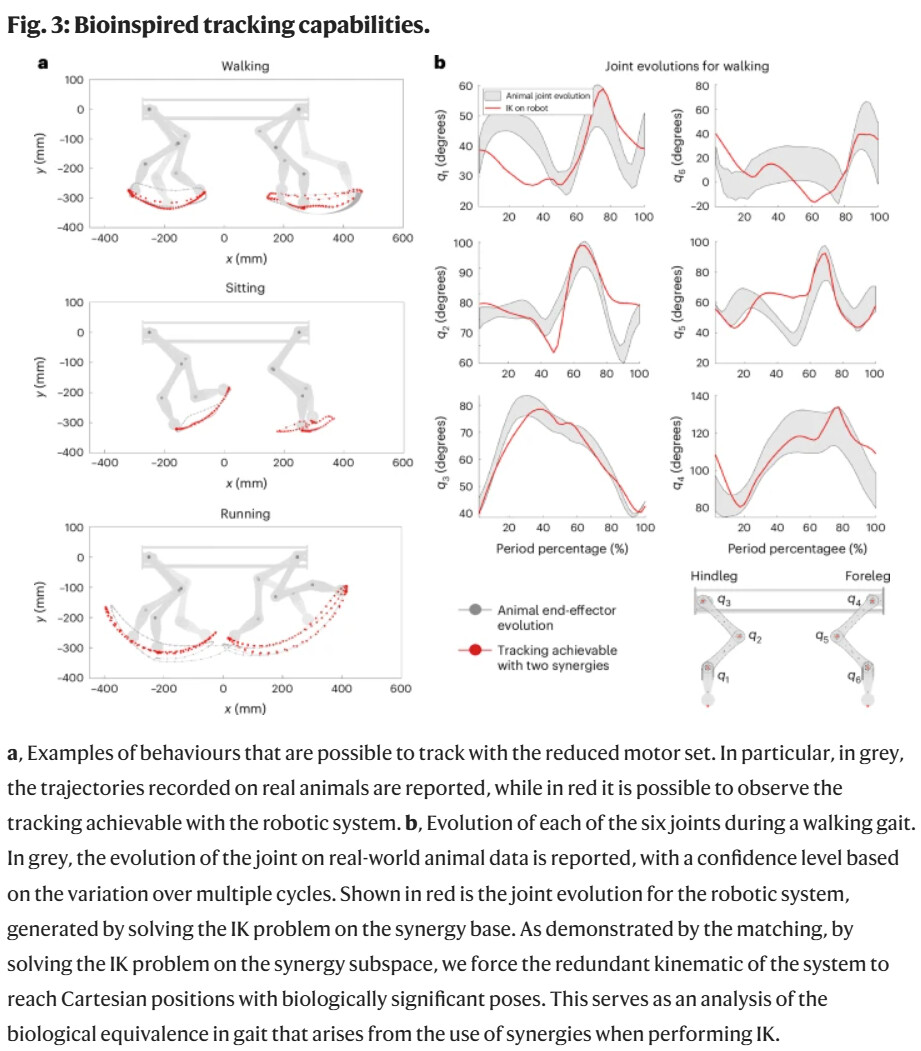
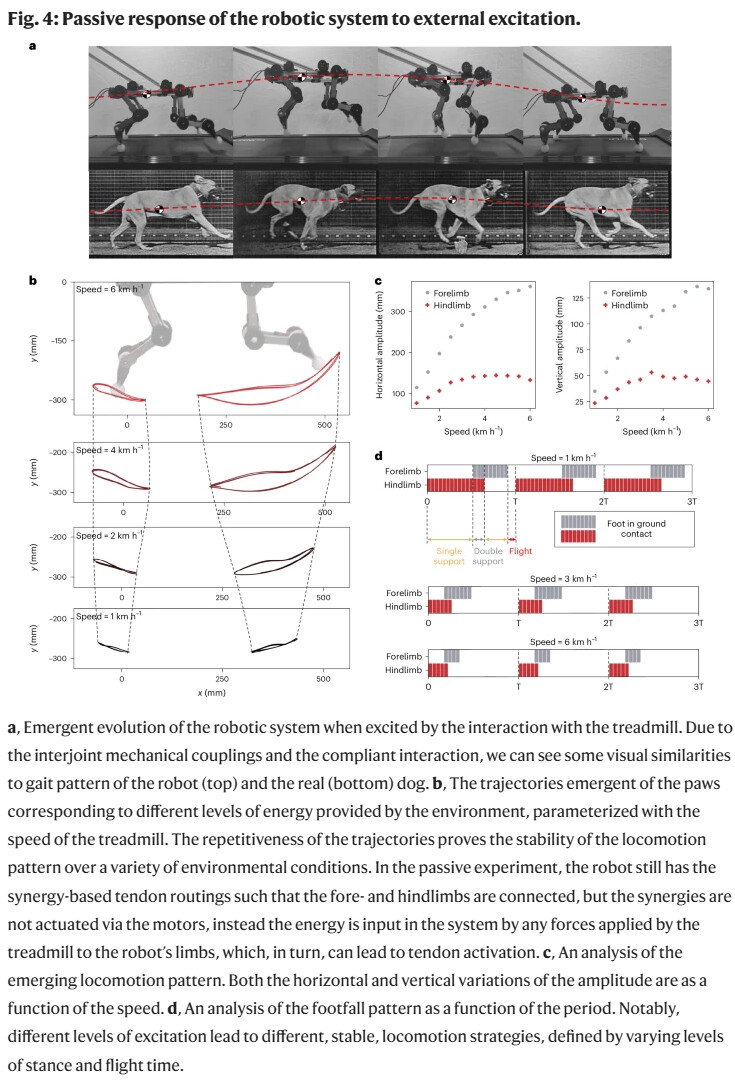
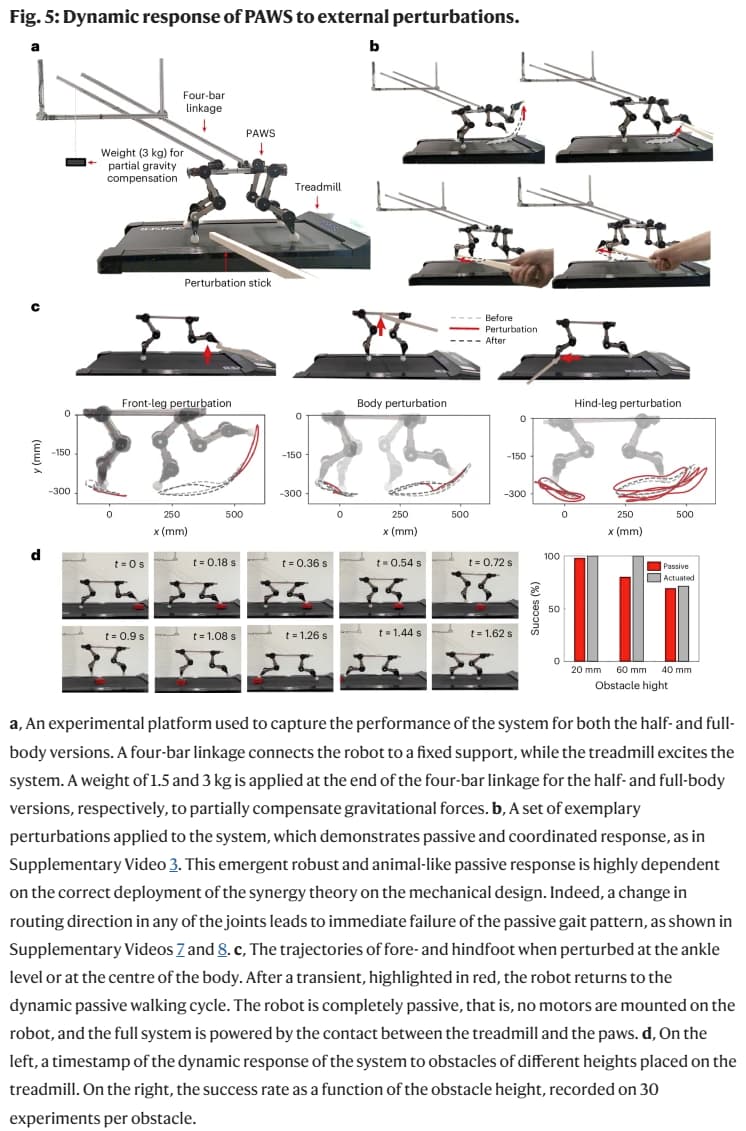
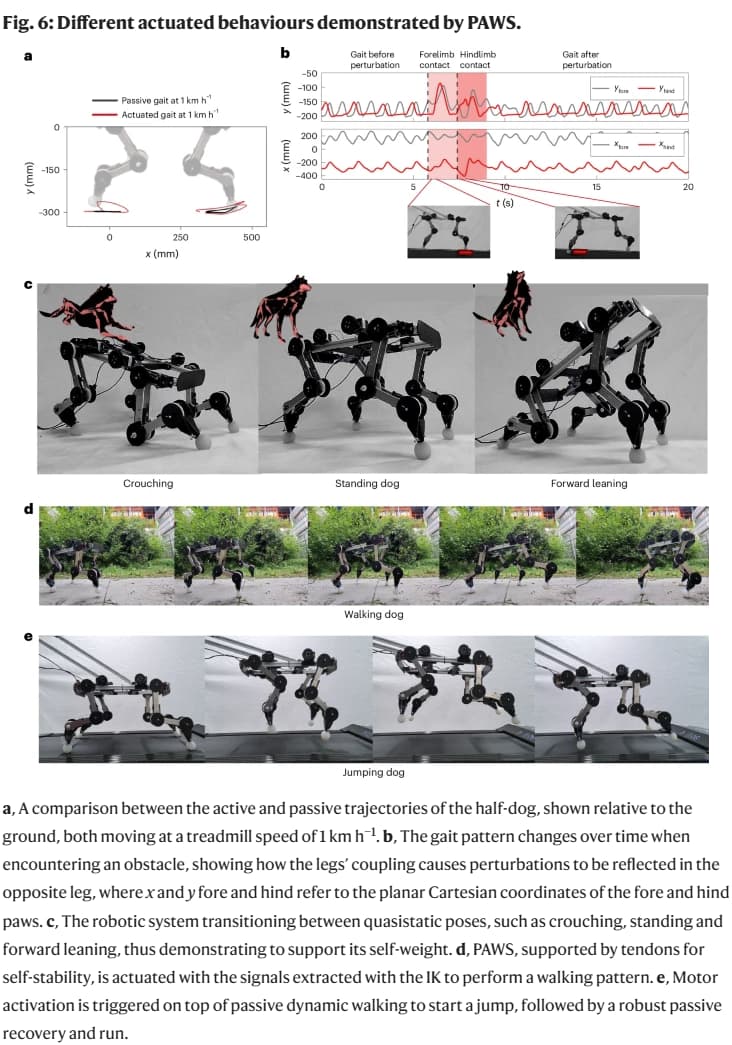
Quadrupedal animals show remarkable capabilities in traversing diverse terrains and display a range of behaviours and gait patterns. Achieving similar performance by exploiting the natural dynamics of the system is a key goal for robotics researchers. Here we show a bioinspired approach to the design of quadrupeds that seeks to exploit the body and the passive properties of the robot while maintaining active controllability on the system through minimal actuation. Utilizing an end-to-end computational design pipeline, neuromechanical couplings recorded in biological quadrupeds are translated into motor synergies, allowing minimal actuation to control the full structure via multijoint compliant mechanical couplings. Using this approach, we develop PAWS, a passive automata with synergies. By leveraging the principles of motor synergies, the design incorporates variable stiffness, anatomical insights and self-organization to simplify control while maximizing its capabilities. The resulting synergy-based quadruped requires only four actuators and exhibits emergent, animal-like dynamical responses, including passive robustness to environmental perturbations and a wide range of actuated behaviours. The finding contributes to the development of machine physical intelligence and provides robots with more efficient and natural-looking robotic locomotion by combining synergistic actuation, compliant body properties and embodied compensatory strategies.
Powered by DYNAMIXEL
All Credits Go To: Francesco Stella, Mickaël M. Achkar, Cosimo Della Santina & Josie Hughes
Full Research Paper: Synergy-based robotic quadruped leveraging passivity for natural intelligence and behavioural diversity | Nature Machine Intelligence
ROBOTIS e-Shop: www.robotis.us
DYNAMIXEL Page: www.dynamixel.com
DYNAMIXEL LinkedIn: DYNAMIXEL | LinkedIn