thermaldesign.pdf (3.5 MB)
Abstract—
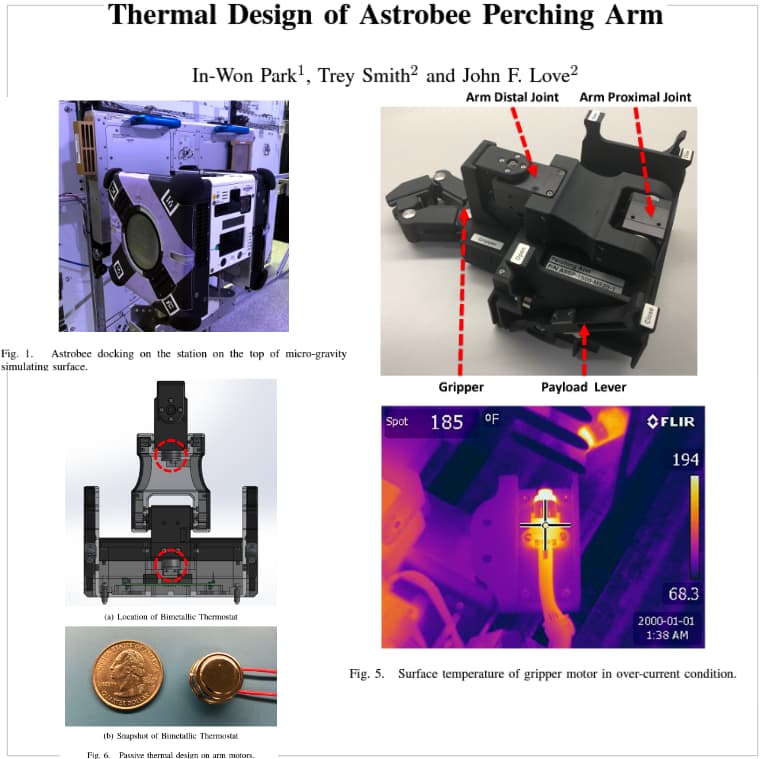
This paper presents the thermal design of actuators in the perching arm of Astrobee robot that will operate inside the International Space Station (ISS) in starting 2019. Since the crew’s safety is of the utmost importance on the ISS, all materials used in the Astrobee robot should meet the touch temperature requirements according to the ISS safety standards to protect crew from skin burns. The Astrobee perching arm consists of 2-DOF arm servo motors and 1DOF gripper DC motor, which are capable of overheating when stalled, particularly given the lack of gravity-driven thermal convection in the ISS zero-gee environment. Thermal properties of two types of actuators are verified by monitoring the touch temperature in worst-case operations with no thermal protection. Then, the proper thermal protection designs have been conducted and installed to guarantee the safety in all conditions.
This academic paper features our DYNAMIXEL XH430-W210 all-in-one smart actuators
All credit goes to: In-Won Park, Trey Smith and John F. Love