hri_final_report.pdf (618.4 KB)
Abstract
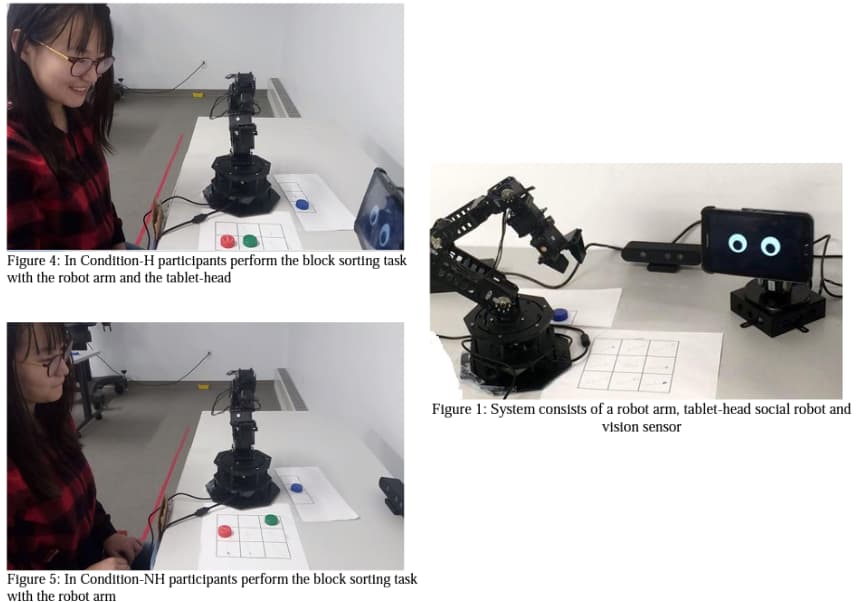
Most of the collaborative robot arms working alongside humans on factory floors do not have mechanisms for communicating with the human teammates. On the other hand, most of the socially expressive robots do not have capabilities to perform industrial tasks with high accuracy and repeatability. In this work we evaluate the effect of combining a social tablet-head robot with a collaborative robot arm. The tablet-head communicates with the human teammate through gazes and nods when they execute a collaborative task with the robot arm. We evaluate the effect of a tablet-head on likability and efficiency of the robot. In our experiments, human participants perform a collaborative task with the robot arm in the presence and absence of this tablet-head. Our quantitative analysis shows that the likability of robot arm increases if it is accompanied by a tablet-head. Also, we find that the task efficiency is not affected by the inclusion of a tablet-head.
Keywords—Collaborative Robots, Social Robots, Human-Robot Interaction, Non-verbal communication, Teamwork and Collaboration
All credit goes to Alap Kshirsagar and Julia Chen, from the Sibley School of Mechanical Engineering, Cornell University