Vision-Guided Loco-Manipulation with a Snake Robot
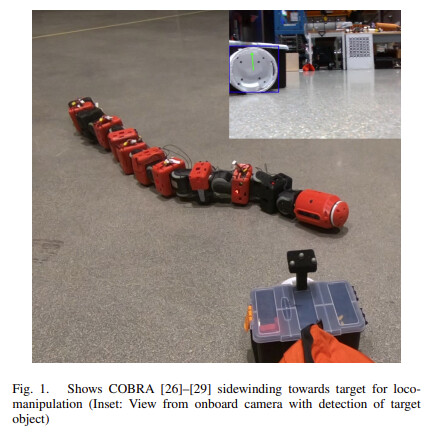
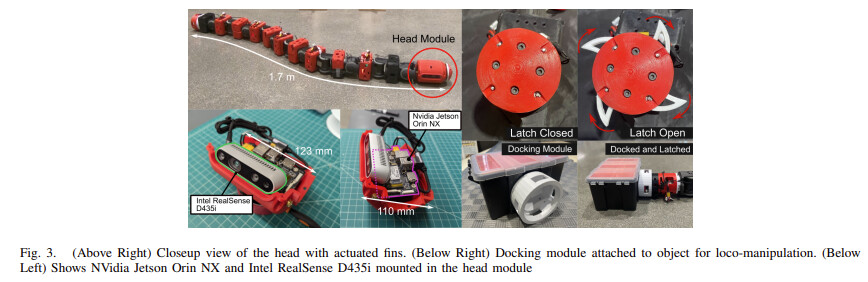
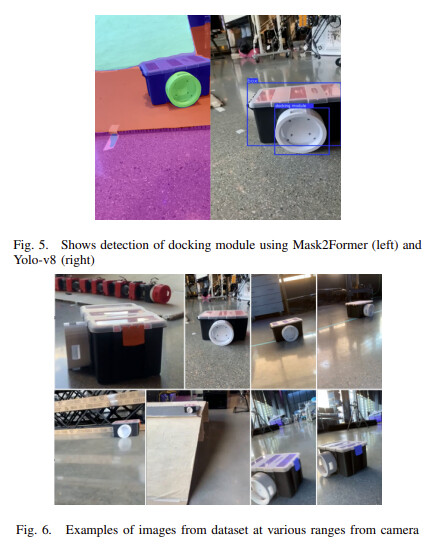
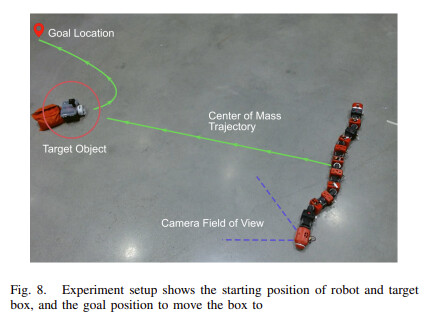
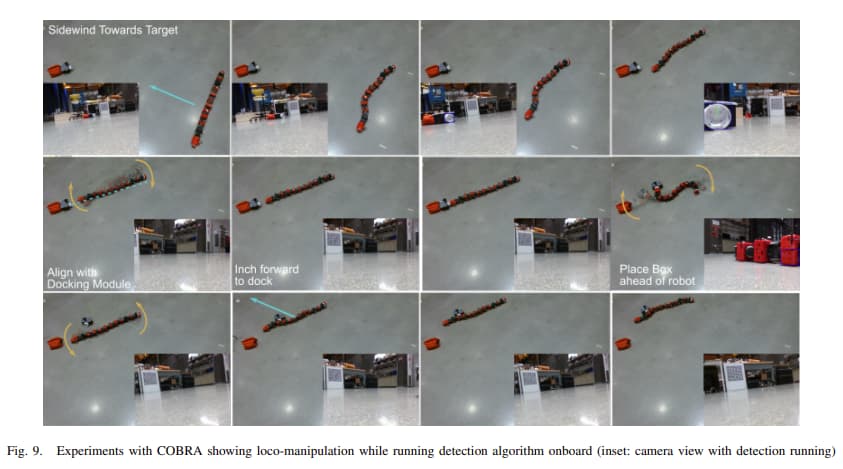
Abstract— This paper presents the development and integration of a vision-guided loco-manipulation pipeline for Northeastern University’s snake robot, COBRA. The system leverages a YOLOv8-based object detection model and depth data from an onboard stereo camera to estimate the 6-DOF pose of target objects in real time. We introduce a framework for autonomous detection and control, enabling closed-loop loco-manipulation for transporting objects to specified goal locations. Additionally, we demonstrate open-loop experiments in which COBRA successfully performs real-time object detection and loco-manipulation tasks.
Powered by DYNAMIXEL
Full Research Paper: [2503.18308] Vision-Guided Loco-Manipulation with a Snake Robot
All Credits Go To: Adarsh Salagame, Sasank Potluri, Keshav Bharadwaj Vaidyanathan, Kruthika Gangaraju, Eric Sihite, Milad Ramezani, Alireza Ramezani and Northeastern University
ROBOTIS e-Shop: www.robotis.us
DYNAMIXEL Page: www.dynamixel.com
DYNAMIXEL LinkedIn: DYNAMIXEL | LinkedIn